
Once you have identified the obstacles that stand in the way of achieving your goal and developed milestones that will overcome them, you need an execution plan: a set of actions that combine step-by-step to bring your system inexorably closer to its goal. Others who read your plan (and ideally participated in its creation) should be able to clearly see how every action, and particularly the actions in which they play a role contribute to the benefit of the entire system. This is the key to creating buy-in: a shared vision that yields enthusiastic cooperation. The Transition Tree (TRT) is an effective tool for creating an execution plan that creates a transition from the current reality to a future reality.
Transcript continues after video.
Although a Transition Tree is related to the more traditional PERT diagram used in Project Management in that they both contain a set of sequenced actions, one of their main distinctions is the TRT’s inclusion of Preconditions (assumptions about reality) paired with each action. This means that TRTs can contain numerous contingency plans that are triggered by the Preconditions that pertain at the time the plan is executed. Essentially, as execution of the plan proceeds, numerous different PERT charts can “fall out” of a TRT depending on what the “situation on the ground” looks like. This makes the TRT an ideal tool for creating plans that involve a significant degree of risk.
Flying Logic Setup
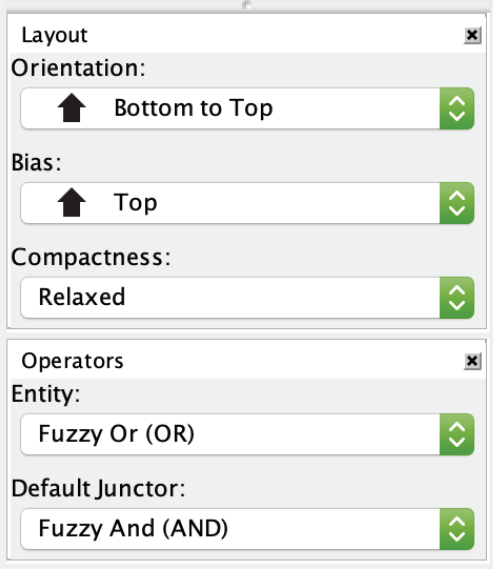
A TRT is based on Sufficient Cause Thinking, and this is how Flying Logic documents are set up when first created, so you do not need to do anything special with the Operators popup menus to start creating your TRT. TRTs often flow upwards, with the Goal at the top. So you may want to use the Orientation popup menu to change the orientation of your document to Bottom to Top.
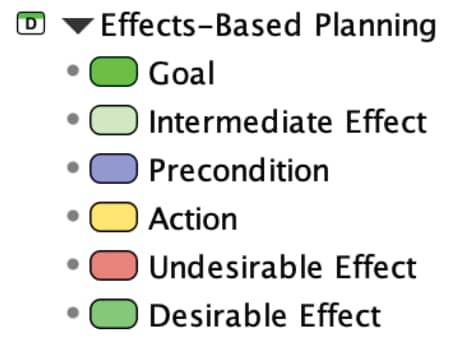
TRTs are created using the entity classes in the built-in Effects-Based Planning domain, and primarily use the following classes: Goal, Precondition, Intermediate Effect, and Action. You can also use Desirable Effect entities to highlight other positive benefits of your plan, and Un-Desirable Effect entities if your sequence of actions causes unavoidable UDEs that further part of the execution plan must address.
Step 1: Identify the Goal
A TRT often contains a single Goal entity, but can contain more than one if they are reasonably related. You can start a TRT with an intuitive pre-conception of what your Goal should be, or you can start with your Goal as one of the injections taken from a Future Reality Tree, or an Objective taken from a Prerequisite Tree. In any case, the Goal entity should have as its title a clear, present-tense statement of the desired reality.
Step 2: Identify Intermediate Effects
If you have already done a Prerequisite Tree, you have a set of Milestone entities that you can copy directly into your Transition Tree document. It’s important to realize, however, that while the Milestones in a PRT are all necessary, they probably aren’t sufficient. The PRT is used for identifying and overcoming the things you don’t have yet, while the TRT is used for identifying everything you need to do, and the order in which you need to do them.
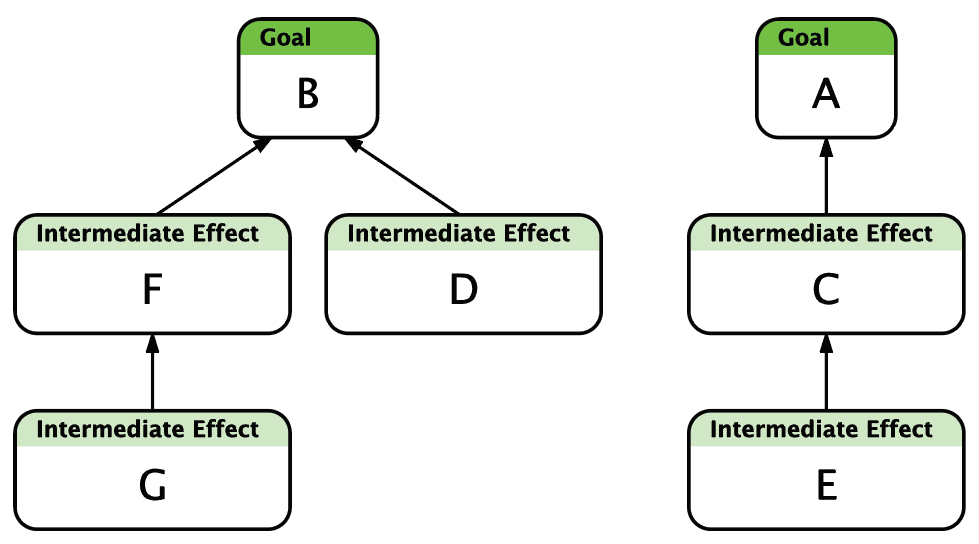
If you are not copying Milestone Entities from a PRT, you may want to create a number of Intermediate Effect entities that represent states you know will need to achieve along the way to your goal, and link them with edges to their order is more or less defined. It is not necessary to be absolutely rigorous at this stage; defining the exact causal sequence is the focus of the following steps.
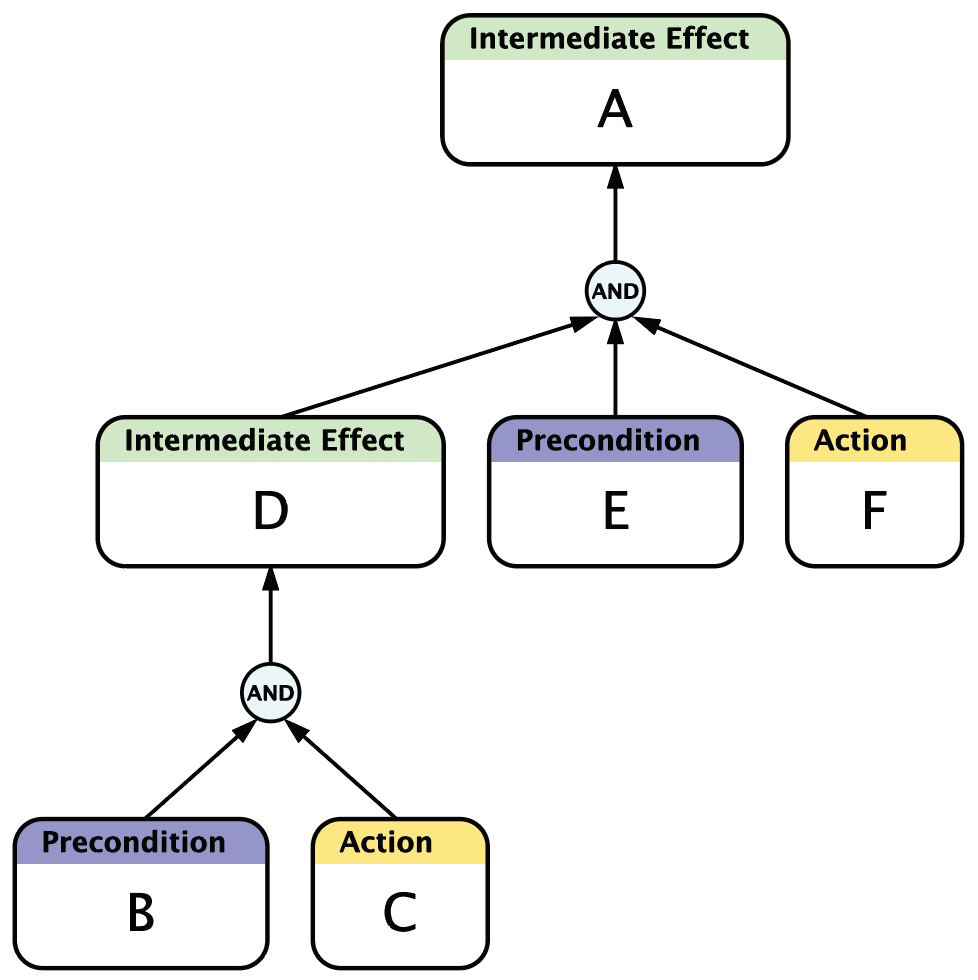
Step 3: Define a Complete Step
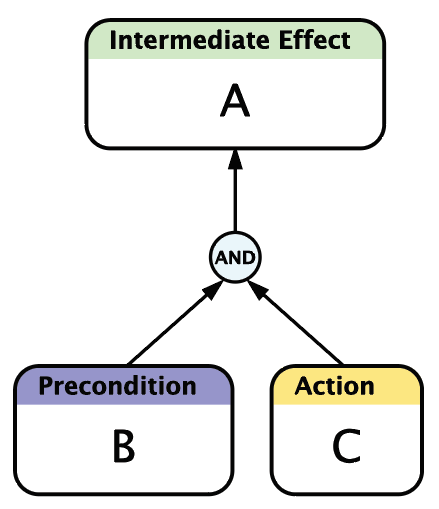
A step of your execution plan requires three things:
- The outcome you want to achieve. This is either an Intermediate Effect, a Milestone copied from a PRT, or the Goal of your TRT.
- A statement of current reality. This is either a Precondition entity, which represents an aspect of reality that is out of your control an which must therefore be taken as a given, or an Intermediate Effect or Milestone that was the outcome of a previous step.
- An Action. To be well-defined, an Action must be something within your control or influence, with clear criteria for determining that it has been carried out successfully, and must be something that can be assigned to a resource with the responsibility and power to carry it out.
The current reality and action must logically combine as the necessary and sufficient causes of achieve the outcome.
If in reading your step, the action is not sufficient to produce the outcome, then it needs to be broken down into one or more sufficient sub-steps.
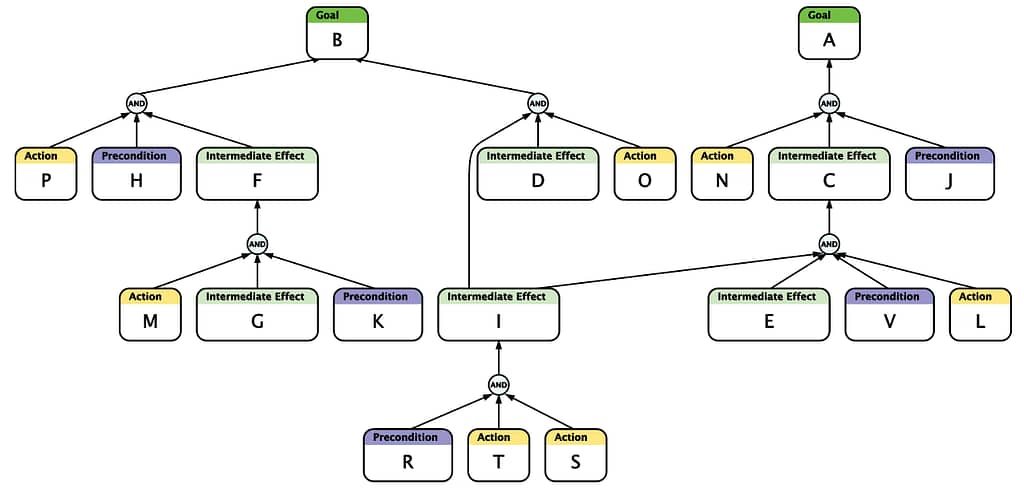
Step 4: Continue Building the Tree
Each of the intermediate effects in your TRT must similarly be characterized as complete steps: outcome of actions and current realities. Often these steps will form a linear sequence, but other times they will diverge into parallel sequences, or have more complex dependencies.
Step 5: Seek and Address Negative Branches
This is similar to the step of the same name in the description of the Future Reality Tree (FRT). In fact, a TRT can be thought of as a kind of FRT where instead of starting with an injection and ending up with the consequences, you start with a desired consequence (the Goal) and work backwards to the injections that will achieve it.
If you are working from a FRT you created previously, then your actions may already be designed to avoid the Un-Desirable Effects (UDEs) that are the hallmarks of negative branches.
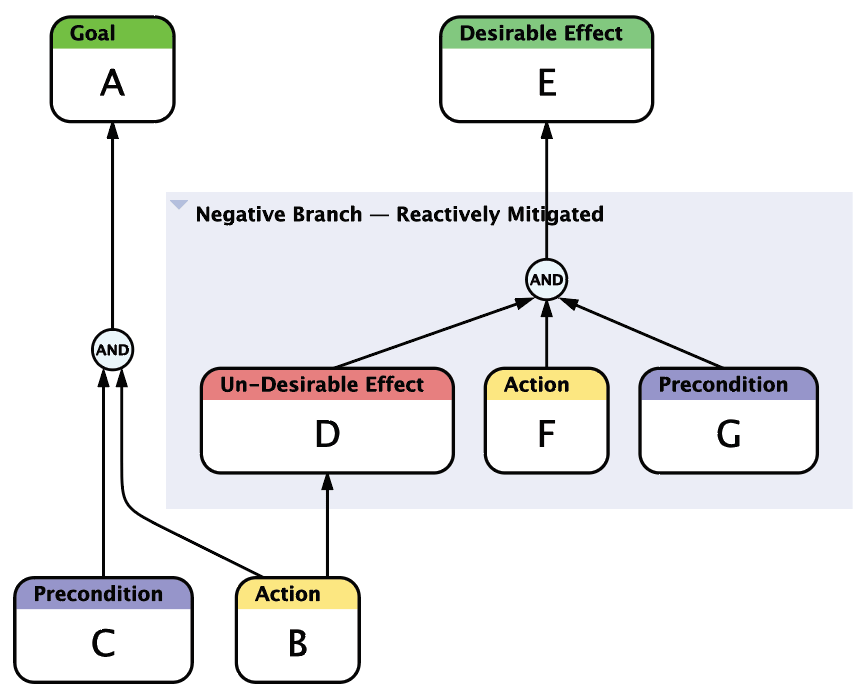
On the other hand, sometimes it is impossible to avoid risk. Risk manifests as the failure of Preconditions (assumptions about reality) to be True when it comes time to execute the actions that depend on them. Depending on the nature of the environment in which the plan is executed, exactly which Preconditions may not hold true at the time the plan is executed can be very difficult to predict, and if you create a plan with a rigid picture of reality, you are likely to be disappointed when reality fails to conform. Thus, to the degree that your plan involves risks, it is critically important that you identify the UDEs that can result from the failure of Preconditions, and develop alternative courses of action that either mitigate those UDEs (the reactive approach) or avert them (the proactive approach.)
If a plan terminates with any un-addressed UDEs, it is incomplete.
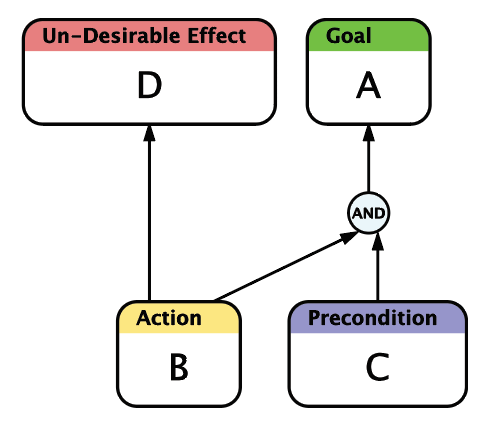
A complete plan will terminate only with Goals or Desirable Effects.

Complete Plan — Proactive Avoidance
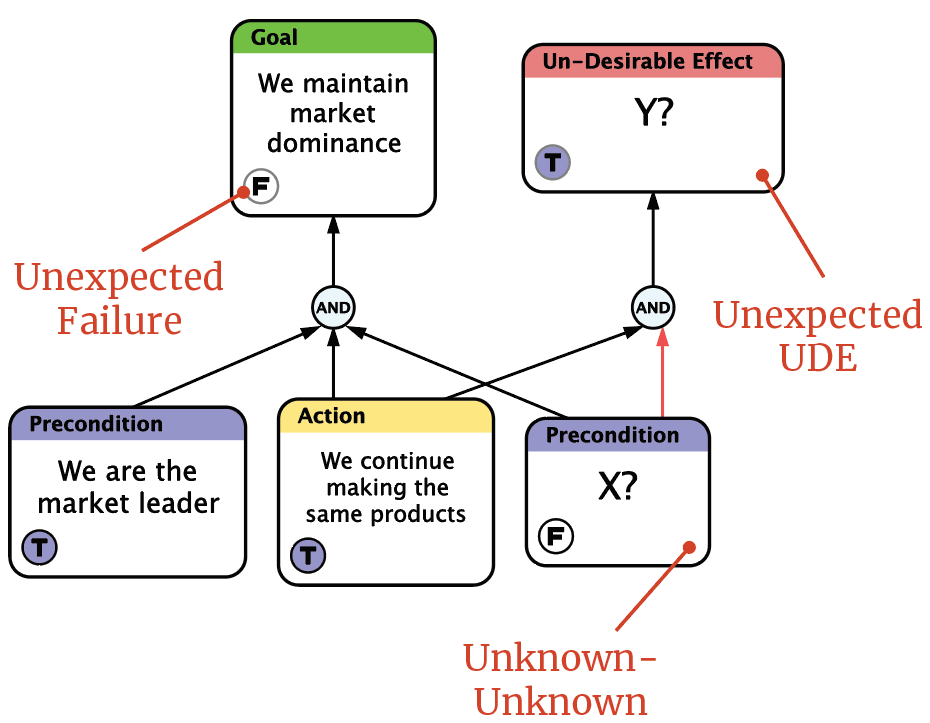
Finally, what happens if all the conditions determined to be necessary and sufficient for a particular effect are present, but when the plan is executed the effect turns out to be absent? What if some other UDE we didn’t anticipate manifests? More importantly, how can we reduce the chances of this nightmare from occurring?
This is the case of unforeseen uncertainty (also called unknown-unknowns): things that have not been and could not have been imagined or anticipated. In this case there can be no pre-determined contingency plan, but there are some things we can do to prepare:
- If possible, try several approaches in parallel and ultimately commit to the one that works the best.
- Avoid hubris: nurture an organizational culture of humility and resist being blinded by your own expertise.
- Be flexible and willing to adapt the plan to a changing situation.
- Give heed to hunches and concerns of experienced stakeholders, even if those reservations are not (for the moment) clearly articulated.
For the last case, even inarticulate reservations can be added to a TRT as unspecified Preconditions, and removed later if they fail to materialize. Don’t add unknown-unknowns at every possible place, only where a strong, but unspecific reservation has been expressed. Unknown-unknowns can also be added as part of assessment when planned effects fail to materialize as a plan is executed.
Step 6: Read and Verify the Tree
This is similar to the step of the same name in the description of the Future Reality Tree (FRT). If you have included contingency plans, then step through the pertinent parts of your tree more than once, each time setting up your Preconditions to trigger the different paths through your tree.
What’s Next?
Wanting to do more with Flying Logic? You may want to check out these articles: